Xiang Li
 Ph.D. Student, College of AI, Tsinghua University
Ph.D. Student, College of AI, Tsinghua University
I am currently a first-year Ph.D. student at CollegeAI, THU, advised by Prof. Ya-Qin Zhang. I am also an intern of AIR, THU and TARS. Previously, I received my B.Eng. degree from Dept. of Computer Sci. & Tech., THU.
My research interests include 3D Scene Understanding, Autonomous Driving and Embodied AI.

Education
-
College of AI, Tsinghua University
Ph.D. Student Sep. 2025 - Now
-
Department of Computer Science and Technology, Tsinghua University
B.Eng. in Computer Science Sep. 2021 - Jun. 2025
Honors & Awards
- Kindle Blue Scholarship 2025
- Tsinghua Doctoral Fellowship for Future Scholar 2025
- Outstanding Graduate of Department 2025
- Tsinghua Excellent Academic Scholarship 2022 / 2023 / 2024
- Tsinghua Excellent Art Scholarship 2022 / 2023
- Tsinghua Freshman Scholarship 2021
Experience
-

TARS
Research Intern Feb. 2025 - Now
-

Institute for AI Industry Research, Tsinghua University
Research Intern Sep. 2023 - Now
-

HKU Musketeers Foundation Institute of Data Science
Student Research Assistant Jul. 2024 - Sept. 2024
News
Selected Publications (view all )
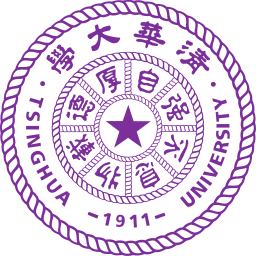
Enhancing Indoor Occupancy Prediction via Sparse Query-Based Multi-Level Consistent Knowledge Distillation
Xiang Li, Yupeng Zheng, Pengfei Li, Yilun Chen, Ya-Qin Zhang, Wenchao Ding
Robotics and Automation Letters (RA-L) 2025
We pioneer a hierarchical distillation strategy that establishes coordinated knowledge transfer between teacher and student models and progressively incorporates guidance information, specifically designed for sparse query-based occupancy prediction.
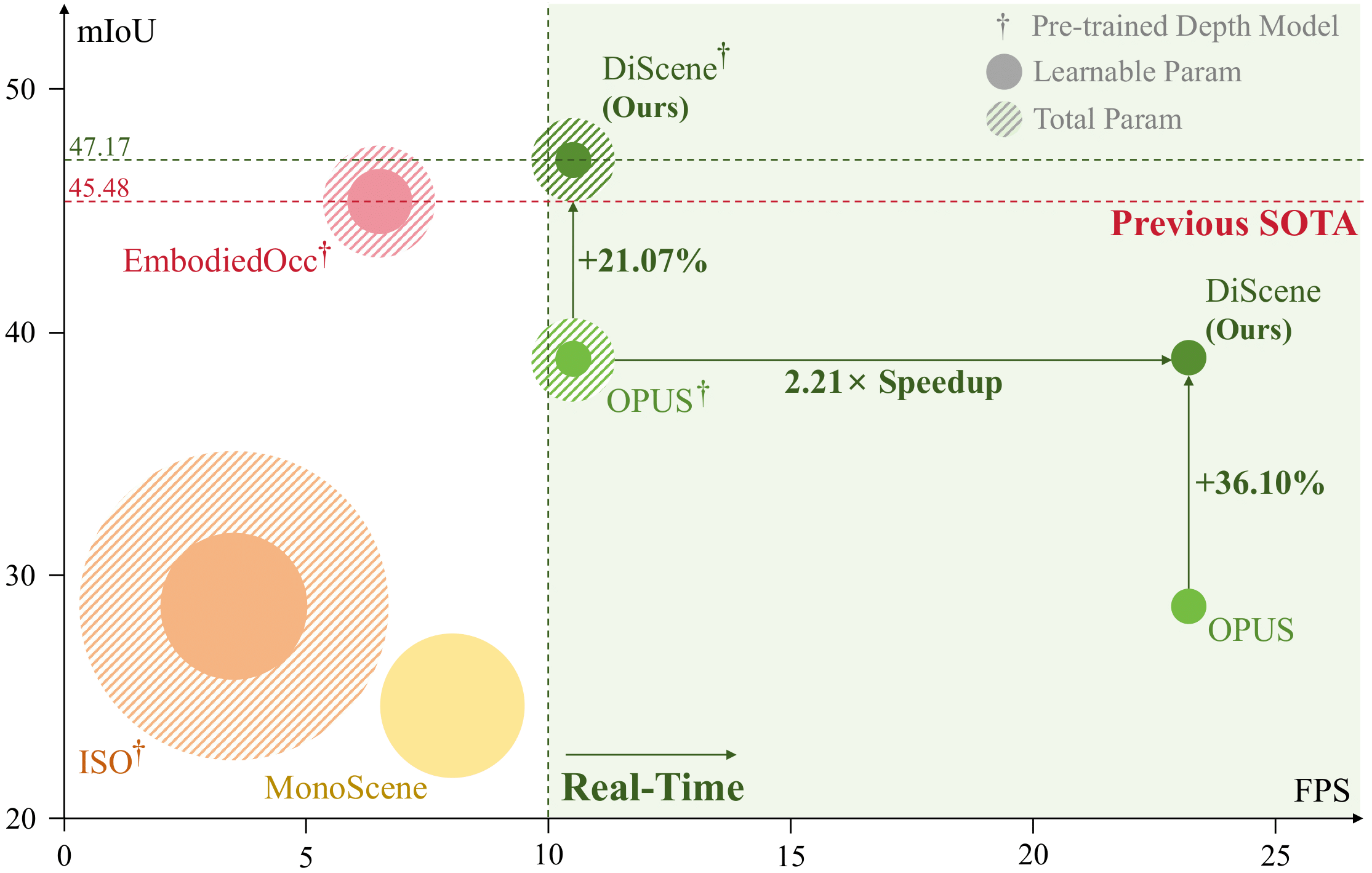
Semi-Supervised Vision-Centric 3D Occupancy World Model for Autonomous Driving
Xiang Li, Pengfei Li, Yupeng Zheng, Wei Sun, Yan Wang, Yilun Chen
International Conference on Learning Representations (ICLR) 2025
Our semi-supervised 3D occupancy world model, featuring 2D rendering supervision and an end-to-end architecture, can forecast future occupancy straightly from image inputs while taking advantage of 2D labels.
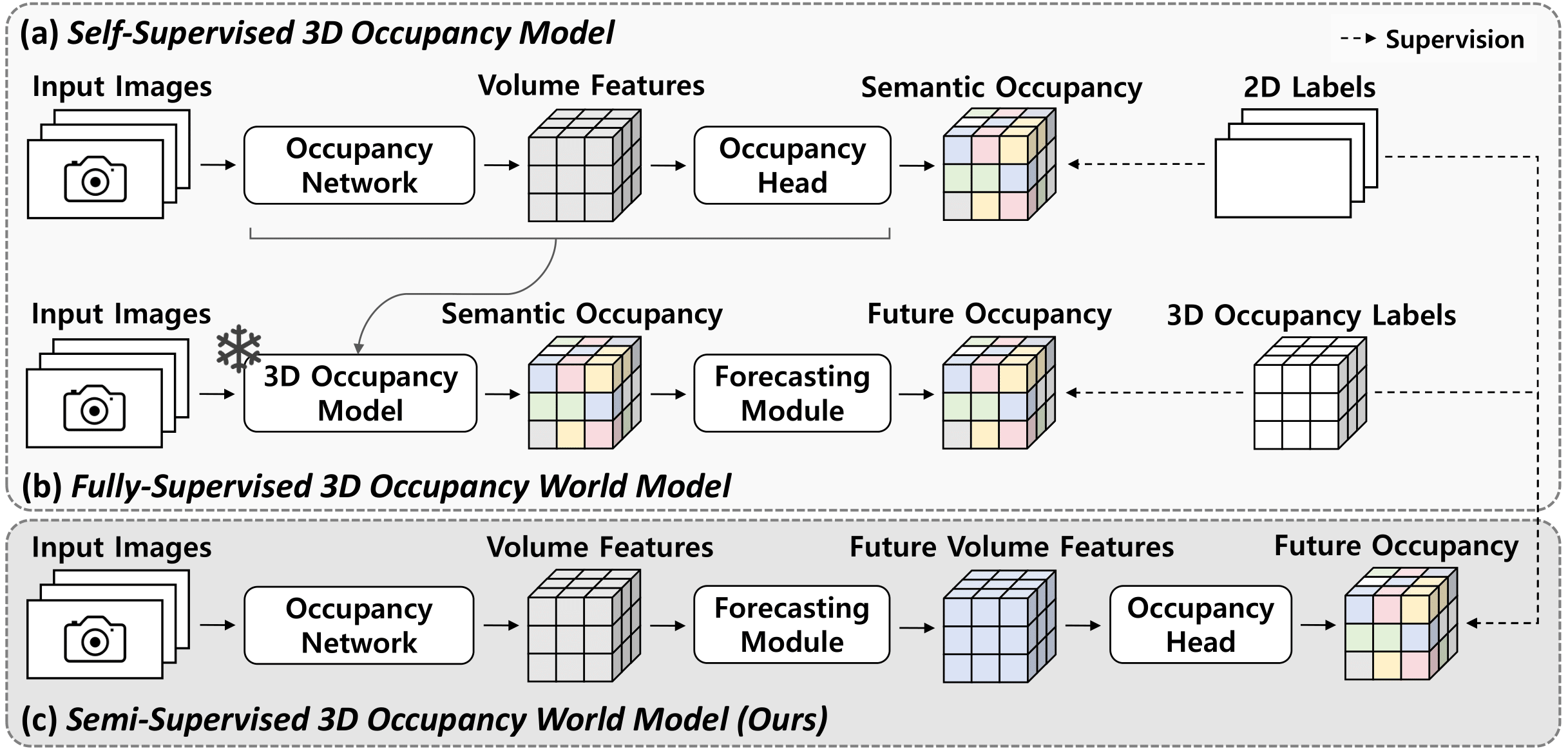
MonoOcc: Digging into Monocular Semantic Occupancy Prediction
Yupeng Zheng*, Xiang Li*, Pengfei Li, Yuhang Zheng, Bu Jin, Chengliang Zhong, Xiaoxiao Long, Hao Zhao, Qichao Zhang(* equal contribution)
International Conference on Robotics and Automation (ICRA) 2024
By proposing a distillation module to transfer temporal information and richer knowledge to the monocular branch from a privileged branch, we increase the performance of the framework especially on small and long-tailed objects, while striking a balance between performance and efficiency.